Final Year Project
Representation, Detection and Tracking of deformable shoelaces
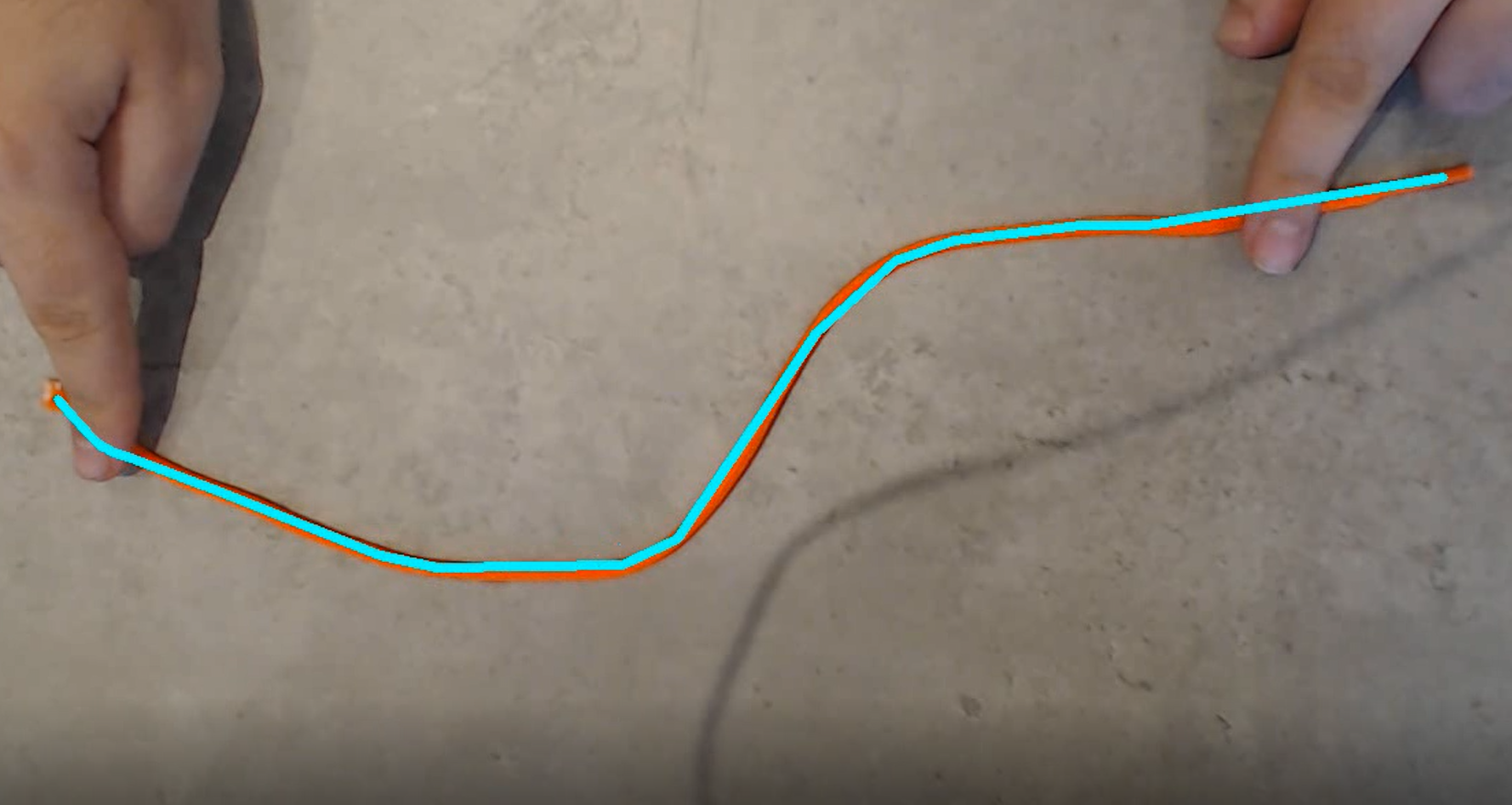
My final year project involved research into the best methods to detect, track and represent a deformable shoelace. This piece of work explored the failures in the current methods for tracking deformable objects that occur when the target has a small diameter. Work was then performed to find a new solution for tracking objects with these characteristics. Multiple different methods were explored and tested to find the best overall solution.
Report abstractThis project explores the past research into, and the design of a system which will represent and track the location of a deformable shoelace in real time. The primary emphasis of this project is the creation of a program to accurately track the location of a shoelace-like object that deforms, with an output that can be used to help with the robotic fastening of shoelaces. Previous work on tracking deformable objects has focused mainly on using point-clouds generated by depth-based cameras. This project explores and highlights the failures of current RGBD-based cameras and their inability to detect small and thin objects. This project looks at the relative performance of new methods to detect and track a deformable shoelace using a single RGB camera. Existing physics models, computer vision (CV) algorithms and novel use, case specific implementations are used to help bridge the gap left by the absence of depth data. The resultant program developed can detect and track a deformable shoelace from a single RGB camera in 2-dimensional space, with methods outlined as to how further work would allow for 3-dimensional tracking.
Github repositoryGithub linkReportReport available on request